교량 건설현장에서 고소 작업에 투입되는 인력을 대신해 원격 제어 로봇이 교량용 거더를 설치, 교각을 시공할 수 있는 기술이 개발됐다.
한국건설기술연구원(원장 김병석, 이하 건설연)은 교량 건설현장에서의 추락사고를 막을 수 있는 ‘교량 원격‧무인화 시공 기술’을 개발했다고 최근 밝혔다.
건설연이 개발한 이 기술을 적용하면 높은 위치에서 진행되는 작업에 인력을 투입하지 않아도 되기 때문에 추락사고와 같은 사고의 원인을 근본적으로 제거해 건설현장의 안전성이 향상될 수 있다.
교량 종류 중 많이 사용되는 거더 교량의 경우 교각을 시공하는 과정과 교량용 거더를 설치하는 과정에서 고소 작업이 이뤄지는데, 이 과정에서 작업자가 추락해 중상을 입거나 사망하는 사고가 종종 발생한다.
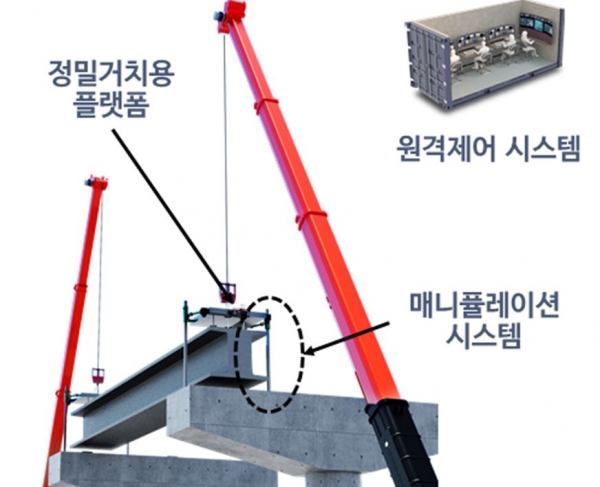
교량용 거더를 설치하기 위해서는 크레인으로 운반된 거더를 계획된 위치에 자리 잡도록 거더의 위치를 정밀하게 조정하는 작업이 필요하다. 현재는 작업자가 교각 위에서 거더를 직접 밀고 당기는 방식으로 이뤄지고 있다.
건설연 이상윤 박사 연구팀이 개발한 ‘거더 원격 정밀거치 로봇’은 원격제어 시스템을 통해 전달되는 명령에 따라 교각 위에서 거더의 위치와 방향을 조정할 수 있다.
건설연에서는 개발된 거더 원격 정밀거치 로봇의 시작품에 대한 공개 실험을 실시했고, 실험 영상을 스마트건설사업단 홈페이지를 통해 공개했다.
공개 실험에서는 원격 정밀거치 장비의 기능 수행 여부를 확인하고, 향후 150톤 규모의 인양 용량에 맞춰 제작될 실규모 장비의 안전성을 사전 점검했다.
이밖에도 건설연은 원격 제어 로봇 적용 기술을 활용한 ‘교각 원격시공 기술’도 개발했다.
교각시공 과정에서의 특정 작업을 로봇으로 원격 조정할 수 있도록 한 기술이다. 작업의 종류에 따라 로봇용 작업 도구(Attachment)를 기성품인 로봇팔에 탈부착해 작동할 수 있도록 했다.
건설연은 작업 도구 시제품 1종(바이브레이터: Vibrator)과 시작품 2종(그리퍼: Gripper, 철근 커플러: Rebar Coupler)을 개발했다. 개발된 시제품과 시작품인 바이브레이터와 그리퍼, 철근 커플러는 각각 콘크리트를 다지는 작업, 미리 제작된 철근망을 잡아서 위치를 조정하는 작업, 그리고 철근을 연결하는 작업에 사용된다.
김병석 원장은 “매년 기사화될 만큼 건설노동자의 고령화가 심각한 수준이고, 숙련노동자 확보가 어려운 국내 건설 환경에서 원격 제어 로봇은 건설재해를 줄일 수 있는 기술적인 대안이 될 것”이라고 밝혔다.

